ГИДРОЛОКАЦИЯ
(от греч. hydor — вода и лат. locatio — размещение), определение положения подводных объектов при помощи акустич. сигналов, излучаемых самими объектами (пассивная локация) или возникающих в результате отражения от подводных объектов искусственно создаваемых звук. сигналов (активная локация). Г. имеет большое значение в навигации для обнаружения невидимых подводных препятствий, в рыбном промысле для обнаружения косяков и отд. крупных рыб, в океанологии как инструмент исследования физ. св-в океана, картографирования морского дна, поиска затонувших судов и т. п. Г. применяется также в военных целях для обнаружения подводных лодок, надводных кораблей и др. и наблюдения за ними, для определения координат целей при применении торпедного и ракетного оружия.
При пассивной локации (шумопеленгации) с помощью шумопеленгатора определяют направление на источник звука (пеленг источника), пользуясь звук. полем, создаваемым самим источником. При этом применяют разл. методы: поворачивают приёмную акустич. антенну с острой направленностью до положения, в к-ром принятый сигнал имеет макс. интенсивность (т. н. макс. метод пеленгования); измеряют разность фаз между сигналами на выходе двух разнесённых в пр-ве антенн (фазовый метод); определяют относит. разницу во времени приёма сигналов двумя разнесёнными антеннами посредством измерения взаимной корреляции (корреляц. метод), а также путём комбинации этих методов. Расстояние до объекта определяют по двум или неск. пеленгам, полученным неск. приёмными системами, разнесёнными на расстояния, сравнимые с расстоянием до лоцируемого объекта (метод триангуляции); так определяется не только положение шумящего объекта, но и траектория его движения. Системы пассивной Г. применяются гл. обр. для гидроакустич. оснащения подводных лодок и надводных кораблей. Пассивной Г. пользуются также при обнаружении подводных шумящих объектов с помощью распределённых береговых и донных систем звукоприёмников, данные от к-рых по подводному кабелю передаются на береговые системы обработки, а также с помощью системы гидроакустич. радиобуев, информация от к-рых принимается по радиоканалу спец. самолётами, курсирующими в районе плавания буёв.
Если источник звука излучает короткий звук. импульс, то положение источника можно определить по разностям времён прихода импульсов, принятых ненаправленными приёмниками в трёх или более разнесённых по пр-ву пунктах. Таким способом определения местоположения источников пользуются в береговой системе дальнего обнаружения судов, терпящих бедствие в открытом океане (система СОФАР); источником звука при этом служит взрыв заряда, погружаемого на определ. глубину.
Системы активной Г. основаны на явлении звук. эха (рис. 1) и различаются методами модуляции (см. МОДУЛЯЦИЯ КОЛЕБАНИЙ) посылаемого сигнала и способами обзора пр-ва. 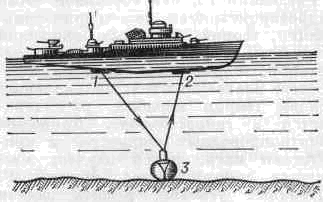 .
.
Рис. 1. Принцип работы гидролокатора: 1 — излучатель; 2 — приёмник; 3 — отражающее тело.
Для определения дальности объекта чаще всего пользуются амплитудной и частотной модуляциями сигнала. При амплитудной импульсной модуляции расстояние R до цели находится по времени запаздывания t0 отражённого импульса: R=ct0/2, где с — скорость распространения звука в среде. При частотной модуляции частота / излучаемого сигнала меняется со временем t по линейному закону f(t)=f0+gt, где t0 и g — постоянные начальная частота и скорость изменения частоты. Отражённый сигнал, принятый приёмником 3 (рис. 2, а), отличается по частоте от сигнала, излучаемого в данный момент (рис. 2, б), т. к. принятый сигнал (рис. 2, в) представляет собой задержанную на время tc копию посланного сигнала, а частота излучаемого сигнала за время tс изменилась согласно приведённой ф-ле. Для неподвижной цели разность частот постоянна и равна: f- =gtс (рис. 2, г). Выделив разностную частоту, определяют расстояние до цели R=сf-/2g. Аналогична схема действия гидролокатора с шумовым излучением и корреляц. обработкой сигнала.
Осн. хар-кой гидролокаторов явл. дальность обнаружения, к-рая зависит от мощности излучаемого сигнала, от уровня акустич. помех и от условий распространения звука в водной среде. Её обычно определяют по величине т. н. порогового сигнала, т. е. сигнала мин. интенсивности, ещё различимого на фоне помех. 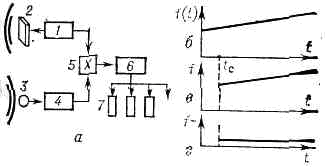 .
.
Рис. 2. а — блок-схема гидролокатора с частотной модуляцией: 1 — генератор, 2 — излучатель, 3 — приёмник, 4 — усилитель, 5 — смеситель, 6 — детектор, 7 — фильтр; б — посланный сигнал; в — принятый сигнал; г — принятый сигнал для неподвижной цели.
Наряду с помехами на дальность обнаружения оказывает влияние рефракция звука, имеющая место в сложных гидрол. условиях. Совр. гидролокаторы способны обнаруживать большие отражающие объекты в среднем на расстоянии неск. км.
Значения в других словарях
- гидролокация — -и, ж. Определение местоположения тела, находящегося под водой по отраженным от него звуковым сигналам или по звукам, источником которых является само тело. Малый академический словарь
- Гидролокация — (от Гидро... и лат. locatio — размещение) определение положения подводных объектов при помощи звуковых сигналов... Большая советская энциклопедия
- гидролокация — орф. гидролокация, -и Орфографический словарь Лопатина
- гидролокация — Гидр/о/лок/а́ци/я [й/а]. Морфемно-орфографический словарь
- гидролокация — ГИДРОЛОКАЦИЯ -и; ж. [от греч. hydōr — вода и лат. locus — место]. Определение местоположения и скорости движения тела, находящегося под водой, с помощью отражённых от него или посланных им звуковых сигналов. Толковый словарь Кузнецова
- гидролокация — гидролокация ж. Определение местоположения и скорости движения тела, находящегося под водой, с помощью отраженных от него или посланных им звуковых сигналов. Толковый словарь Ефремовой
- ГИДРОЛОКАЦИЯ — ГИДРОЛОКАЦИЯ (от гидро... и лат. locatio — размещение) — определение местонахождения и скорости движения подводных объектов при помощи звуковых сигналов, излучаемых самими объектами (пассивная локация... Большой энциклопедический словарь
