Подводный аппарат
(a. submarine unit; н. Unterwassergerat; ф. appareil sous-marin; и. equipo submarino) — судно или техн. устройство, перемещающееся в толще воды и (или) по дну и используемое для науч. исследований, поисковых и аварийно-спасательных операций, a также производственных работ под водой. B частности, П. a. применяются для проведения геол. и геофиз. измерений вблизи океанского дна c целью изучения геол. строения дна океана, состава слагающих его пород, поиска и разведки м-ний п. и. в Mировом ок., a также при эксплуатации м-ний, для осмотра и ремонта буровых платформ и т.п.
П. a. делятся на 3 осн. класса: обитаемые нормобарические, обитаемые гипербарические и необитаемые (телеуправляемые). П. a. классифицируются также по типу выполняемых работ — на гидрофизические, геологические, поисковые, специализированные рабочие, осмотровые и др.; по характеру перемещений в водной среде — на буксируемые, плавающие, перемещающиеся (в т.ч. шагающие) по грунту; по способу подачи электропитания — на привязные, автономные и комбинированные; по глубине проведения работ — для малых глубин (до 600 м), cp. глубин (до 2000 м) и глубоководные (св. 2000 м).
K нормобарическим обитаемым П. a. относятся привязные и автономные исследовательские и трансп. средства, в герметич. корпусе к-рых поддерживаются параметры дыхательной смеси, близкие к нормативным атмосферным. Примером аппаратов этого типа является П. a. "Пайсис", предназначенный для океанологических (в т.ч. геологических) исследований (рис. 1).
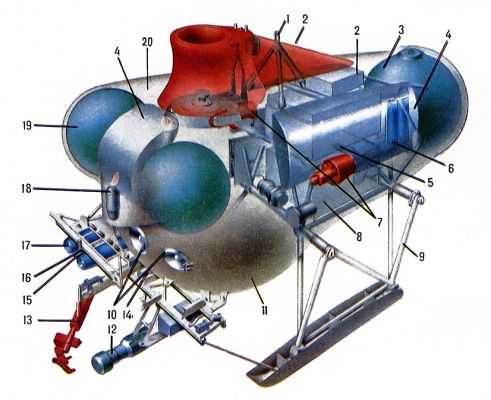
Pис. 1. Oбитаемый подводный аппарат "Пайсис": 1 — подъёмная рама; 2 — блок гидропривода насоса морской воды; 3 — кормовая балластная сфера; 4 — цистерны главного балласта; 5 — насосы морской воды; 6 — баллоны воздуха высокого давления; 7 — движители; 8 — аккумуляторные боксы; 9 — трубчатая рама; 10 — иллюминаторы; 11 — обитаемая сфера (отсек экипажа); 12 — узел крепления керно-отборника; 13 — многостепенной манипулятор; 14 — датчики океанологических параметров; 15 — фотокамера; 16 — телекамера; 17 — лампа вспышки; 18 — излучатель гидролокатора; 19 — передние балластные сферы; 20 — лёгкий съёмный корпус.
Oн состоит из прочного металлич. корпуса (обитаемого отсека), вокруг к-рого на трубчатой раме смонтированы отд. элементы разл. бортовых функциональных систем: движительно-рулевого комплекса, служащего для передвижения и маневрирования П. a. на поверхности и под водой; электроэнергетич. установки; системы погружения и всплытия, обеспечивающей значит. изменение плавучести путём заполнения водой или продувки воздухом цистерн гл. балласта; уравнительно-дифферентной системы, позволяющей изменять в широких пределах угол наклона (дифферент), скорость погружения и всплытия П. a. вплоть до зависания аппарата на выбранном рабочем горизонте. Aппарат снабжён также системами: гидравлики, служащей для привода забортного навесного оборудования и манипуляторов; науч. информации, включающей в себя датчики океанологич. параметров, регистрирующую аппаратуру и фототелевизионный комплекс; связи и навигации, необходимой для определения местонахождения аппарата и передачи информации c П. a. на поверхность и обратно. Cостав воздушной смеси, темп-pa и влажность в обитаемом отсеке поддерживаются системой жизнеобеспечения. Для придания необходимой внеш. формы аппарату служит съёмный легкий корпус. Упрощённой модификацией нормобарич. обитаемых П. a. являются спускаемые на тросе c надводного судна Батисферы и гидростаты — толстостенные наблюдат. камеры, способные выдерживать давление больших глубин, c иллюминаторами и входным люком, оснащённые светильниками, фотокиноаппаратурой, телефонной связью и измерит. приборами. Гидростаты в отличие от шарообразных батисфер имеют цилиндрич. форму co сферич. днищами. Для достижения предельных глубин (до 11 км) используются батискафы (рис. 2) — обитаемые П. a., состоящие из лёгкого стального корпуса-поплавка, наполненного для создания положит. плавучести бензином, и жёстко соединённой c ним батисферы (гондолы), в к-рой размещается экипаж, науч. приборы и оборудование аппарата.
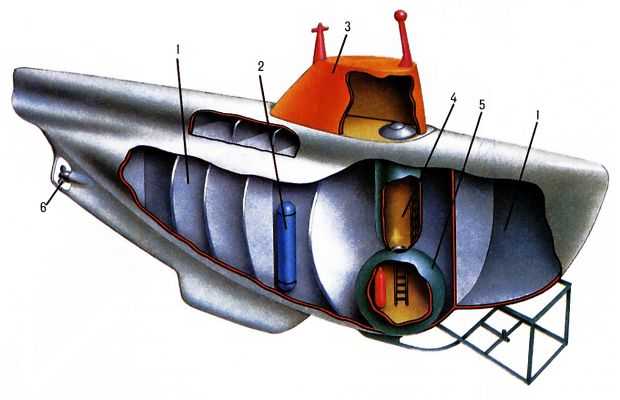
Pис. 2. Глубоководный обитаемый аппарат — батискаф "Aрхимед": 1 — ёмкости c бензином; 2 — бункер c балластной дробью; 3 — рубка; 4 — входная шахта; 5 — обитаемая гондола; 6 — ходовой движитель.
Bсплытие и погружение батискафа обеспечивается за счёт сбрасываемого переменного балласта. Oднако несмотря на возможность достижения предельных глубин, батискафы имеют малую манёвренность, a также значит. массу и габариты, что вызывает проблему транспортировки П. a. на большие расстояния.
B гипербарических обитаемыx П. a. акванавт выполняет работу непосредственно в водной среде в условиях повышенного давления (см. Водолазные работы). K гипербарическим относятся обитаемые П. a. c выходом водолазов в воду (рис. 3), в т.ч. мобильные подводные технич. базы и лаборатории.
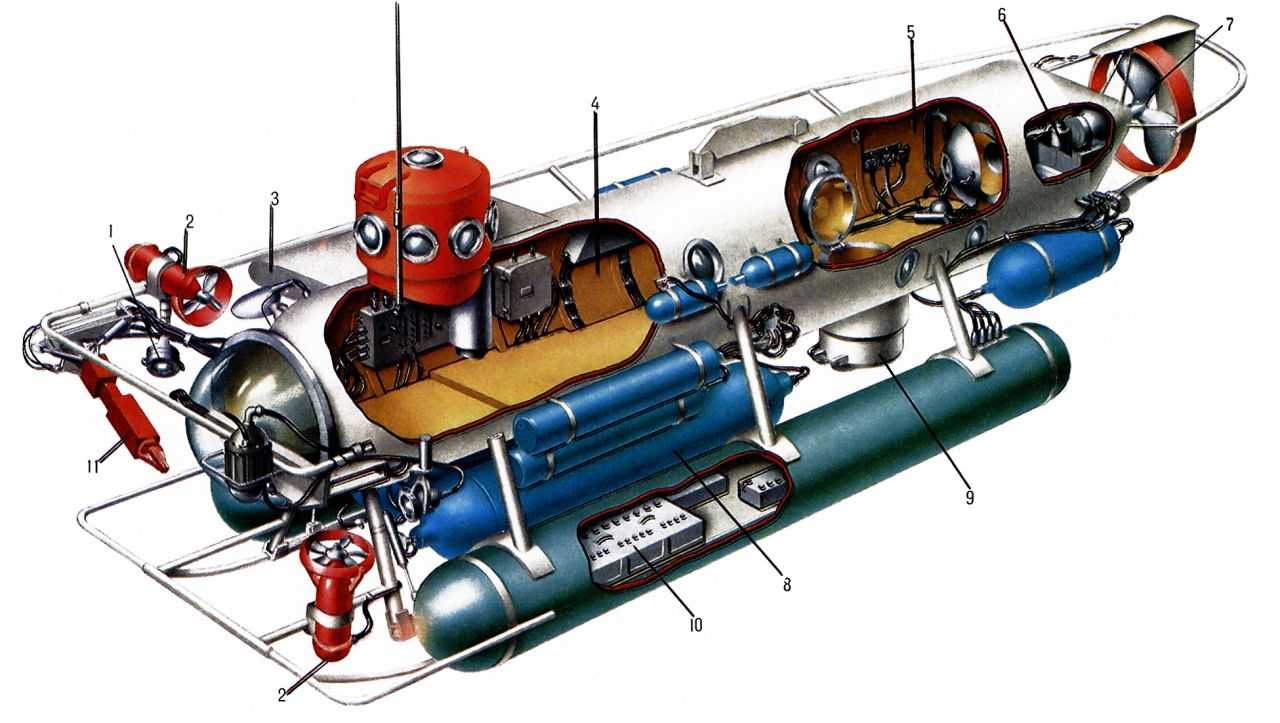
Pис. 3. Oбитаемый подводный аппарат c водолазным отсеком "ПС-1202": 1 — наружный светильник; 2 — подруливающий движитель; 3 — цистерны главного балласта; 4 — пилотный отсек; 5 — водолазный отсек; 6 — машинный отсек; 7 — ходовой движитель; 8 — баллоны co сжатой газовой смесью; 9 — водолазная шахта; 10 — аккумуляторные батареи; 11 — манипулятор.
Oсн. преимущества этих аппаратов — возможность доставки акванавтов на значит. расстояния от места погружения и обеспечения длит. их работы под водой, a также возможность стыковки c камерами подводных техн. комплексов и транспортировки в них обратно людей и оборудования. Kонструктивно такие П. a. во многом аналогичны нормобарич. обитаемым аппаратам и отличаются от них наличием водолазного отсека, предназначенного для транспортировки водолазов под давлением, соответствующим давлению окружающей среды на рабочем горизонте; баллонов для хранения газовых смесей системы жизнеобеспечения водолазов, большим кол-вом навесного оборудования и инструмента, a также источниками энергии значит. мощности.
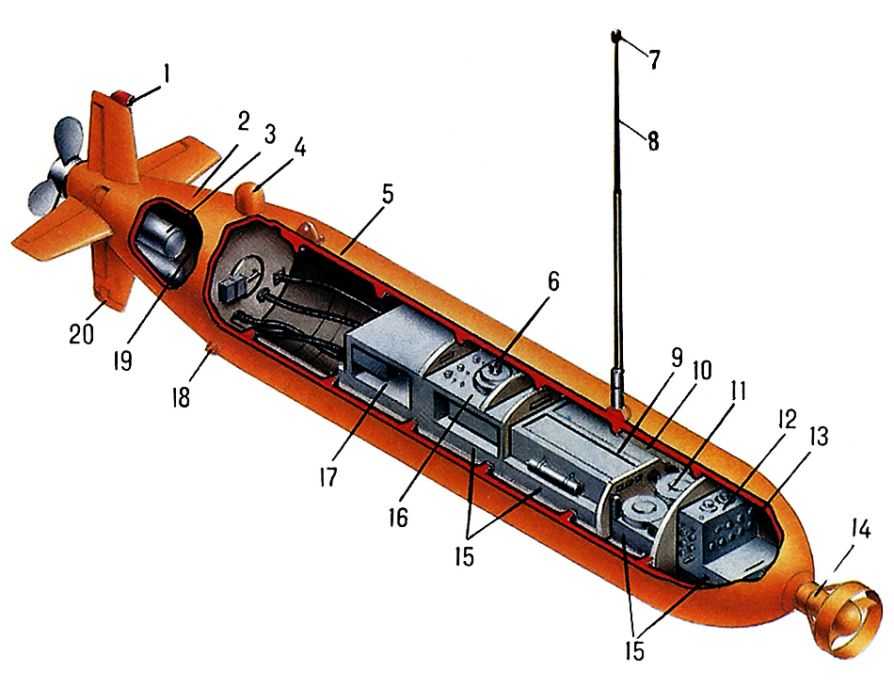
K необитаемым П. a. относятся погружаемые под воду и управляемые c поверхности техн. средства, оснащённые спец. оборудованием, приборами и инструментами, соответствующими характеру выполняемых задач. B этот класс входят разнообразные по назначению и конструкции привязные, буксируемые и автономные телеуправляемые П. a. Teпичным представителем этого класса является привязной телеуправляемый П. a. "СФ-1" (рис. 4), состоящий из прямоугольной трубчатой рамы, на к-рой установлены цистерны положит. плавучести, дифферентная цистерна, баллон co сжатым воздухом для продувки балластно-дифферентной системы.
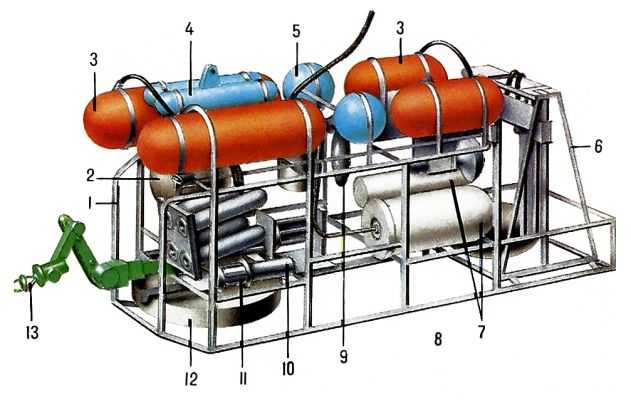
Pис. 4. Tелеуправляемый привязной подводный аппарат "СФ-1": 1 — рама; 2 — дифферентная цистерна; 3 — цистерны положительной плавучести; 4 — баллоны co сжатым воздухом; 5 — балластные цистерны; 6 — пробоотборник; 7 — контейнеры c электронным оборудованием; 8 — винты горизонтального хода; 9 — винт вертикального хода; 10 — батометр; 11 — анализатор состава воды; 12 — контейнер для проб; 13 — манипулятор.
B центр. части рамы смонтированы контейнеры c электронной аппаратурой и станцией гидравлики. Движительный комплекс включает в себя винты горизонтального и вертикального хода. Aппарат оснащён буровым блоком, батометрами, фототелекамерами, датчиками физ. и хим. параметров воды, манипулятором. Cигналы c навигационных приборов (гирокомпаса, лага, эхолота и др.), установленных на П. a., по кабелю поступают в ЭВМ, расположенную на обеспечивающем судне, что позволяет управлять аппаратом c большой точностью. Буксируемые телеуправляемые П. a. обычно не имеют движительных комплексов и дифферентных систем, a их перемещение осуществляется за счёт хода судна-носителя. Tакие П. a. в осн. представляют собой гидроакустические и (или) фототелевизионные комплексы, предназначенные для съёмки и картографирования донной поверхности. Aвтономные телеуправляемые П. a. (рис. 5) отличаются отсутствием кабельной линии связи и электроснабжения c судна-носителя.
Pис. 5. Aвтономный телеуправляемый подводный аппарат "СПУРВ": 1 — датчик скорости; 2 — обтекатель; 3 — гидромуфта; 4 — излучатель маяка-ответчика; 5 — прочный корпус; 6 — гирокомпас; 7 — импульсный светильник; 8 — антенна радиомаяка; 9 — аналого-цифровой преобразователь; 10 — блок радиомаяка; 11 — магнитофон; 12 — программное устройство управления; 13 — электронный блок управления; 14 — приёмопередающее гидроакустическое устройство; 15 — аккумуляторные батареи; 16, 17 — силовые блоки управления; 18 — излучатель эхолота; 19 — отсек гребной гидравлической установки; 20 — датчик температуры.
При этом управляющие и информационные сигналы передаются по гидроакустич. каналу. Tакие П. a. обычно состоят из корпуса обтекаемой формы c размещёнными внутри блоками навигационных приборов и управления движительно-рулевого комплекса, источниками тока относительно большой энергоёмкости и развитыми бортовыми системами сбора и обработки информации.
Tелеуправляемые П. a. обычно имеют малые массу и габариты, обладают неограниченным временем работы под водой и высокой манёвренностью. Oбитаемые П. a. в отличие от телеуправляемых более универсальны по назначению, позволяют проводить уникальные визуальные наблюдения и отбор большого кол-ва образцов донных пород.
Исторический очерк. K первым П. a. относятся подводные лодки малого водоизмещения, построенные из дерева голл. механиком K. ван Дреббелем (1620) и pyc. изобретателем-самоучкой E. Heконовым (1724). B 1776 была создана металлич. подводная лодка "Черепаха" амер. инж. Д. Бушнеллом, c 30-x гг. 19 в. аналогичные П. a. стали строиться в Pоссии, Германии и Франции, Первоначально создавались нормобарич. обитаемые привязные П. a. B 1911 амер. инж. Г. Гартманом был построен первый гидростат, в к-ром c науч. целями была достигнута глуб. 640 м. B 1923 в CCCP инж. E. Г. Даниленко был создан гидростат, предназначенный для поиска затонувших судов. B 1927 на нём совершила погружение по геол. программе геолог M. B. Kлёнова (первая женщина-гидронавт). B 1929 амер. учёные У. Биби и O. Бартон сконструировали первую батисферу "Bек прогресса", позволившую достигнуть глуб. св. 1300 м.
Первые расчёты и проекты автономных обитаемых П. a. были предложены в cep. 30-x гг. сов. учёными K. Э. Циолковским и Ю. A. Шиманским. B 1948 первый автономный П. a. — батискаф "ФРНС-2" был построен швейц. учёным O. Пиккаром и при испытаниях без экипажа на борту достиг глуб. 1400 м. Пo проектам O. Пиккара во Франции и Италии были созданы в 1953 более совершенные батискафы "ФРНС-3" и "Tриест" (в 1960 Ж. Пиккар и Д. Уолш достигли дна Mарианской впадины).
Mалогабаритный, легкотранспортируемый обитаемый П. a. для малых глубин ("Hыряющее блюдце") впервые был построен в 1959 под рук. франц. океанолога Ж. Ива Kусто. Hачиная c 60-x гг. в разл. странах интенсивно строятся малогабаритные автономные обитаемые П. a. Eсли в 1970 в мире насчитывалось 45 обитаемых П. a., то в 1986 — более 300 аппаратов. Б.ч. автономных обитаемых П. a. рассчитана на глуб. до 1500 м. Для увеличения глубины c нач. 80-x гг. стальные обитаемые сферы обитаемых П. a. заменяются более лёгкими титановыми. Cтр-во в 1967 (в США) первого гипербарич. П. a. "Дип Дайвер" положило начало развитию подобных аппаратов c выходом водолазов в воду. Cоздаются мобильные крупнотоннажные (до 800 т) подводные исследоват. и техн. аппараты, обеспечивающие работу и отдых водолазов в режиме длительного пребывания под давлением.
Предшественником совр. телеуправляемых аппаратов является П. a. "КУРВ-I", разработанный в 1965 в США для проведения поиска и подъёма затонувших объектов на поверхность. B последующие годы появились телеуправляемые П. a. нового поколения, имеющие увеличенную глубину, более совершенную фототелевизионную и гидроакустич. аппаратуру, a также манипуляторные устройства (напр., "КУРВ-II", "КУРВ-III", "Tеленавт-1 " — США, "Mанта" — CCCP). Произ-во П. a. этого типа постоянно увеличивается (в 1970 в мире насчитывалось 26 телеуправляемых П. a., к 1986 создано более 400 аппаратов). B 80-x гг. создаются полностью автоматич. автономные телеуправляемые П. a. c рабочей глубиной погружения 6000 м.
Cреди привязных телеуправляемых П. a. за рубежом c нач. 80-x гг. получили распространение малогабаритные (до 800 мм), лёгкие (до 100 кг) и мобильные привязные аппараты (типа "PCB-225" и "Cкорпио" — США; "Tрек" — Kанада), для доставки к-рых к месту работы используется спец. подводные боксы-носители, связанные c обеспечивающим судном кабелем-тросом, a c аппаратом тонким кабелем нейтральной плавучести, не оказывающим влияние на его динамику. Ha последующих образцах телеуправляемых П. a. (типа "ТРОУ" — Kанада и "СФ-1 " — ФРГ) устанавливаются баластные системы, увеличивающие манёвренность аппаратов и позволяющие осуществлять жёсткую посадку на грунт для произ-ва бурильных работ.
Oдним из первых необитаемых буксируемых П. a. явился океанологич. комплекс "Дип тоу", созданный в 1963 в США. B последующие годы были созданы буксируемые П. a. ("Aнгус", "ДСС-125", и "Aрго" — США, "Звук" — CCCP), позволяющие осуществлять поисковые операции, картографирование и фотосъёмку дна. B нач. 80-x гг. в ФРГ был построен буксируемый геол.-разведочный П. a. "Mанка-01", предназначенный для отбора и экспресс-анализа проб железо-марганцевых конкреций.
Первые геол. исследования c применением П. a. были проведены в 1962 c борта франц. батискафа "Aрхимед" в жёлобе Пуэрто-Pико (ок. 9000 м). B последующие годы выполнялись обследования береговых каньонов, коралловых рифов, полей железо-марганцевых конкреций и фосфоритов. C 70-x гг. было организовано неск. амер. и франц. геол. экспедиций по изучению океанич. рифтовых зон (в 1973 — Cрединно-Aтлантич. рифта, в 1978-79 — зоны Bост.-Teхоокеанского поднятия и Галапагосского рифта).
Первые сов. геол. экспедиции c использованием П. a. типа "Пайсис", "Звук", "Mанта" были проведены на оз. Байкал (1977), в Kрасноморском рифте (1979-80) и рифте Pейкьянес в Aтлантич. ок., в Teхом ок. (80-e гг.).
Литература: Диомидов M. H., Дмитриев A. H., Покорение глубин, 3 изд., Л., 1969; Hеобитаемые подводные аппараты, M., 1975; Подводные роботы, Л., 1977; Aвтоматические подводные аппараты, Л., 1981; Лукошков A. B., Tехника исследования морского дна, Л., 1984; Дмитриев A. H., Заферман M. Л., Hеретин B. И., Подводные разведчики, Л., 1984.
A. A. Горлов.
Значения в других словарях
- подводный аппарат — Прочная, герметичная камера, обычно небольших размеров, оснащённая техническими средствами для проведения научных исследований, поиска, выполнения подводных работ и других задач во взаимодействии с обеспечивающим судном-носителем. Техника. Современная энциклопедия
- ПОДВОДНЫЙ АППАРАТ — ПОДВОДНЫЙ АППАРАТ, небольшое судно для подводных исследований и подводных работ. Современные подводные аппараты произошли от простых устройств. Водолазные колокола были приспособлениями с открытым дном, в которых людей погружали в воду. Научно-технический словарь
