КИНЕМАТИКА
(от греч. kinema, род. п. kinematos — движение), раздел механики, посвящённый изучению геом. св-в движений тел, без учёта их масс и действующих на них сил. Методы и зависимости, устанавливаемые в К., используются при кинематич. исследованиях движений, в частности при расчётах передач движений в разл. механизмах, машинах и др., а также при решении задач динамики. В зависимости от св-в изучаемого объекта К. разделяют на К. точки, К. тв. тела и К. непрерывной изменяемой среды (деформируемого тв. тела, жидкости, газа).
Движение любого объекта в К. изучают по отношению к нек-рому телу (тело отсчёта), с к-рым связывают т. н. систему отсчёта (оси х, у, г на рис. 1), позволяющую определять положение движущегося объекта в разные моменты времени относительно тела отсчёта.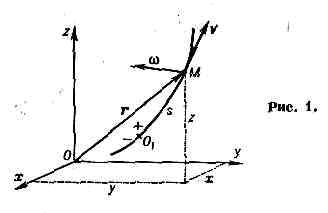
Выбор системы отсчёта в К. произволен и зависит от целей исследования. Напр., при изучении движения колеса вагона по отношению к рельсу систему отсчёта связывают с Землёй, а при изучении движения того же колеса по отношению к кузову вагона — с кузовом и т. д. Движение рассматриваемого объекта считается заданным (известным), если известны ур-ния (или графики, таблицы), позволяющие определить положение этого объекта по отношению к системе отсчёта в любой момент времени.
Осн. задача К.— установление (при помощи тех или иных матем. методов) способов задания движения точек или тел и определение соответствующих кинематич. хар-к этих движений (траектории, скорости и ускорения движущихся точек, угл. скорости и угл. ускорения вращающихся тел и др.).
Движение точки может быть задано одним из трёх способов: векторным, координатным или естественным. При векторном способе положение точки по отношению к системе отсчёта определяется её радиусом-вектором r, проведённым от начала отсчёта до движущейся точки, а закон движения даётся векторным ур-нием: r=r(t). Траекторией точки явл. годограф вектора r. При координатном способе положение точки относительно системы отсчёта определяется к.-л. тремя координатами, напр. прямоугольными декартовыми х, у, z, а закон движения задаётся тремя ур-ниями: x=f1(t), y=f2(t), z=f3(t). Исключив из этих ур-ний время t, можно найти траекторию точки. Естественный (или траекториый) способ применяется обычно, когда известна траектория точки по отношению к выбранной системе отсчёта. Положение точки определяется расстоянием s=О1М от выбранного на траектории начала отсчёта O1, измеренным вдоль траектории и взятым с соответствующим знаком (рис. 1), а закон движения даётся ур-нием s=f(t), выражающим зависимость s от времени t. Зависимость s от t может быть также задана графиком движения, на к-ром в выбранном масштабе вдоль оси t отложено время, а вдоль s — расстояние (рис. 2), или таблицей, где в одном столбце даются значения t, а в другом — соответствующие им значения s. Осн. кинематич. хар-ками движущейся точки явл. её скорость и ускорение.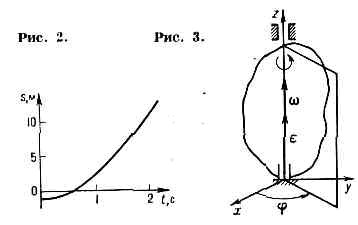
Способы задания движения тв. тела зависят от вида его движения, а число ур-ний движения — от числа степеней свободы тела (см. СТЕПЕНЕЙ СВОБОДЫ ЧИСЛО). Простейшими явл. поступательное движение и вращательное движение тв. тела. При поступат. движении все точки тела движутся одинаково, и его движение задаётся и изучается так же, как движение одной точки. При вращат. движении вокруг неподвижной оси АВ (рис. 3) тело имеет одну степень свободы; его положение определяется углом поворота j, а закон движения задаётся ур-нием: j=f(t). Осн. кинематич. хар-ками явл. угловая скорость w и угловое ускорение e тела. Зная w и e, можно определить скорость и ускорение любой точки тела.
Более сложным явл. движение тела, имеющего одну неподвижную точку и обладающего тремя степенями свободы (напр., гироскоп). В этом случае положение тела относительно системы отсчёта определяется к.-н. тремя углами (напр., Эйлеровыми углами), а закон движения — ур-ниями, выражающими зависимость этих углов от времени. Осн. кинематич. хар-ками явл. w и e тела. Движение тела слагается из серии элем. поворотов вокруг непрерывно меняющих своё направление мгновенных осей вращения ОР, проходящих через неподвижную точку О (рис. 4).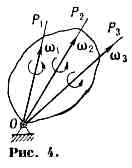
Самый общий случай — движение свободного тв. тела, имеющего шесть степеней свободы. Положение тела определяется тремя координатами одной из его точек, наз. полюсом (в задачах динамики за полюс принимается обычно центр тяжести тела), и тремя углами, к-рые выбираются так же, как для тела с неподвижной точкой. Закон движения тела задаётся шестью ур-ниями, выражающими зависимости названных координат и углов от времени. Движение тела слагается из поступательного вместе с полюсом и вращательного вокруг этого полюса, как вокруг неподвижной точки. Такими, напр., являются: движение в воздухе артиллерийского снаряда или самолёта, совершающего фигуры высш. пилотажа, движения небесных тел. Осн. кинематич. хар-ки — скорость и ускорение поступат. части движения, равные скорости и ускорению полюса, и угл. скорость и угл. ускорение вращения тела вокруг полюса. Все названные хар-ки (как и кинематич. хар-ки для тела с неподвижной точкой) определяются по ур-ниям движения; зная эти хар-ки, можно вычислить скорость и ускорение любой точки тела. Частным случаем рассмотренного движения явл. плосконаправленное (или плоское) движение тв. тела, при к-ром все его точки движутся параллельно нек-рой плоскости. Подобное движение совершают звенья многих механизмов и машин.
В К. изучают также сложное движение точек или тел, т. е. движение, рассматриваемое одновременно по отношению к двум (или более) взаимно перемещающимся системам отсчёта. При этом одну из систем отсчёта рассматривают как основную (её условно наз. неподвижной), а перемещающуюся по отношению к ней систему отсчёта наз. подвижной; в общем случае подвижных систем отсчёта может быть несколько. При изучении сложного движения точки её движение, а также скорость и ускорение по отношению к осн. системе отсчёта наз. условно абсолютными, а по отношению к подвижной системе — относительными. Движение самой подвижной системы отсчёта и всех неизменно связанных с нею точек np-ва по отношению к осн. системе наз. п е р е н о с н ы м движением. Осн. задачи К. сложного движения заключаются в установлении зависимостей между кинематич. хар-ками абс. и относит. движений точки (или тела) и хар-ками движения подвижной системы отсчёта, т. е. переносного движения (см. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ).
Для тв. тела, когда все составные (т. е. относительные и переносные) движения явл. поступательными, абс. движение также поступательное со скоростью, равной геом. сумме скоростей составных движений. Если составные движения тела явл. вращательными вокруг осей, пересекающихся в одной точке (как, напр., у гироскопа), то результирующее движение также явл. вращательным вокруг этой точки с угл. скоростью, равной геом. сумме угл. скоростей составных движений. Если же составными движениями тела явл. и поступательные и вращательные, то результирующее движение в общем случае будет слагаться из серии мгновенных винтовых движений.
В К. сплошной среды устанавливаются способы задания движения этой среды, рассматривается общая теория деформаций и определяются т. н. ур-ния неразрывности (сплошности) среды (подробнее (см. ГИДРОМЕХАНИКА, УПРУГОСТИ ТЕОРИЯ)).
Значения в других словарях
- кинематика — -и, ж. Раздел теоретической механики, изучающий геометрические свойства механического движения тел без учета их массы и действующих на них сил. [От греч. κίνημα, κινήματος — движение] Малый академический словарь
- кинематика — Кинем/а́т/ик/а. Морфемно-орфографический словарь
- Кинематика — (от греч. kínema, родительный падеж kinematos — движение) раздел механики (См. Механика), посвященный изучению геометрических свойств движений без учета их масс и действующих на них сил. Излагаемое ниже относится... Большая советская энциклопедия
- кинематика — орф. кинематика, -и Орфографический словарь Лопатина
- кинематика — Раздел механики, изучающий движение тел без учета их массы и действующих на них сил. Большой астрономический словарь
- кинематика — КИНЕМАТИКА Раздел механики, в котором изучаются характеристики движения тел без учета их массы и действующих на них сил. (Терминология спорта. Толковый словарь спортивных терминов, 2001) Словарь спортивных терминов
- кинематика — КИНЕМАТИКА -и; ж. [от греч. kinēma (kinēmatos) — движение] Раздел теоретической механики, изучающий геометрические свойства механического движения тел без учёта их массы и действующих на них сил. ◁ Кинематический, -ая, -ое. К. метод. К-ие схемы. Толковый словарь Кузнецова
- кинематика — Кинематики, мн. нет, ж. [от греч. kinema – движение] (мех.). Отдел механики – учение о движении независимо от причин, его производящих. Большой словарь иностранных слов
- кинематика — КИНЕМ’АТИКА, кинематики, мн. нет, ·жен. (от ·греч. kinema — движение) (мех.). Отдел механики — учение о движении независимо от причин, его производящих. Толковый словарь Ушакова
- кинематика — кинематика ж. Раздел механики, изучающий геометрические свойства движения тел без учёта их массы и действующих на них сил. Толковый словарь Ефремовой
- КИНЕМАТИКА — КИНЕМАТИКА (от греч. kinema, родительный падеж kinematos — движение) — раздел механики, в котором изучаются геометрические свойства движения тел без учета их массы и действующих на них сил. Большой энциклопедический словарь
- Кинематика — Наука, изучающая состояние движения независимо от вызывающих его сил и получившая название от греческого слова κίνημα — состояние движения и составляющая часть общей науки о движении — механики. Энциклопедический словарь Брокгауза и Ефрона
- кинематика — КИНЕМАТИКА, и, ж. Раздел механики, изучающий движение тел без учёта их массы и действующих на них сил. | прил. кинематический, ая, ое. Толковый словарь Ожегова
